
Ah yes, I think we spoke already in AHPP
 I've managed to make this idea happen already but for BeamNG instead of LFS.
I've managed to make this idea happen already but for BeamNG instead of LFS. Thanks

A little bit overdue, but here is part 2 of the modelling process.
If there are any approval issues I would like to be notified about them.
Thanks, I do wanna try it in VR myself. I haven't done that yet
Thank yall, I'm glad you're hyped!


It's coming along. The interior is always a bit slow and not as fun as the exterior, and that's where I'm at with this right now.
I've also found good refs for pre-facelift and coupe which I will also model in a coherent way so everything fits together nicely.
Also. First part of the modeling time-elapse. roughly 6.5 hours sped up by 50x
It's coming along. The interior is always a bit slow and not as fun as the exterior, and that's where I'm at with this right now.
I've also found good refs for pre-facelift and coupe which I will also model in a coherent way so everything fits together nicely.
Also. First part of the modeling time-elapse. roughly 6.5 hours sped up by 50x
1995-2001 Honda Civic EK/EJ
Here we go again I'm currently working on 2 new cars. An R33 GT-R and this civic.
The full modelling process is being recorded at 5fps into a time elapse.
I'm using images.


Current progress:
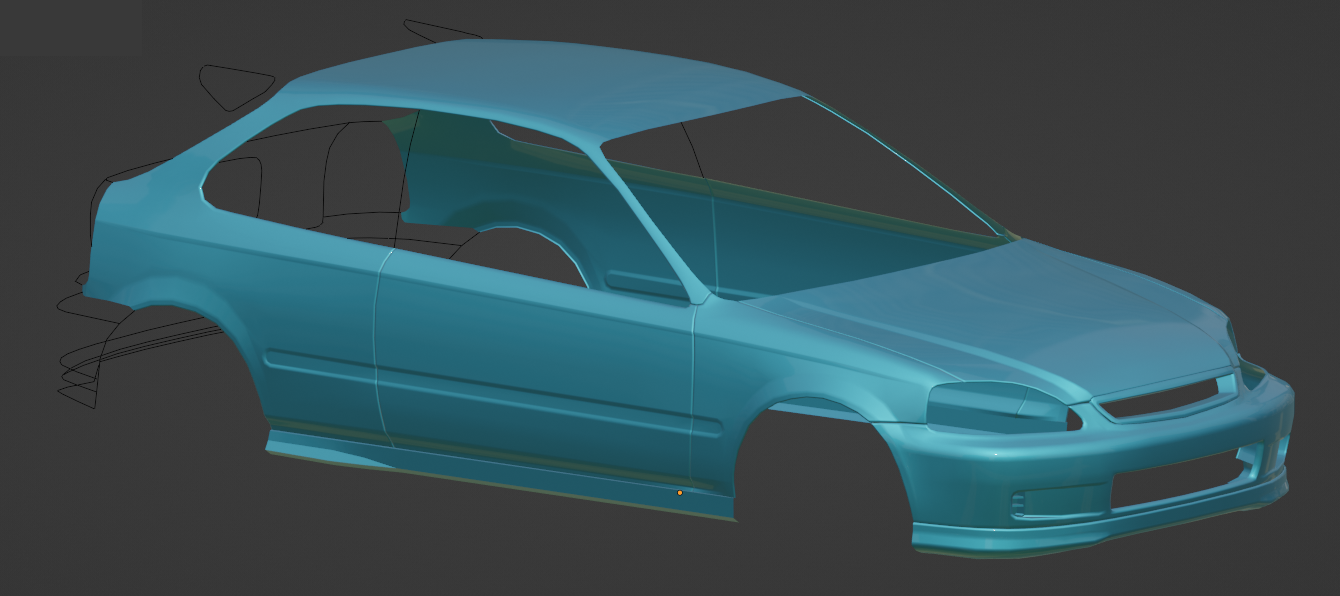
I am planning on making a coupe version as well with shared front end, as well as a pre-facelift front end.
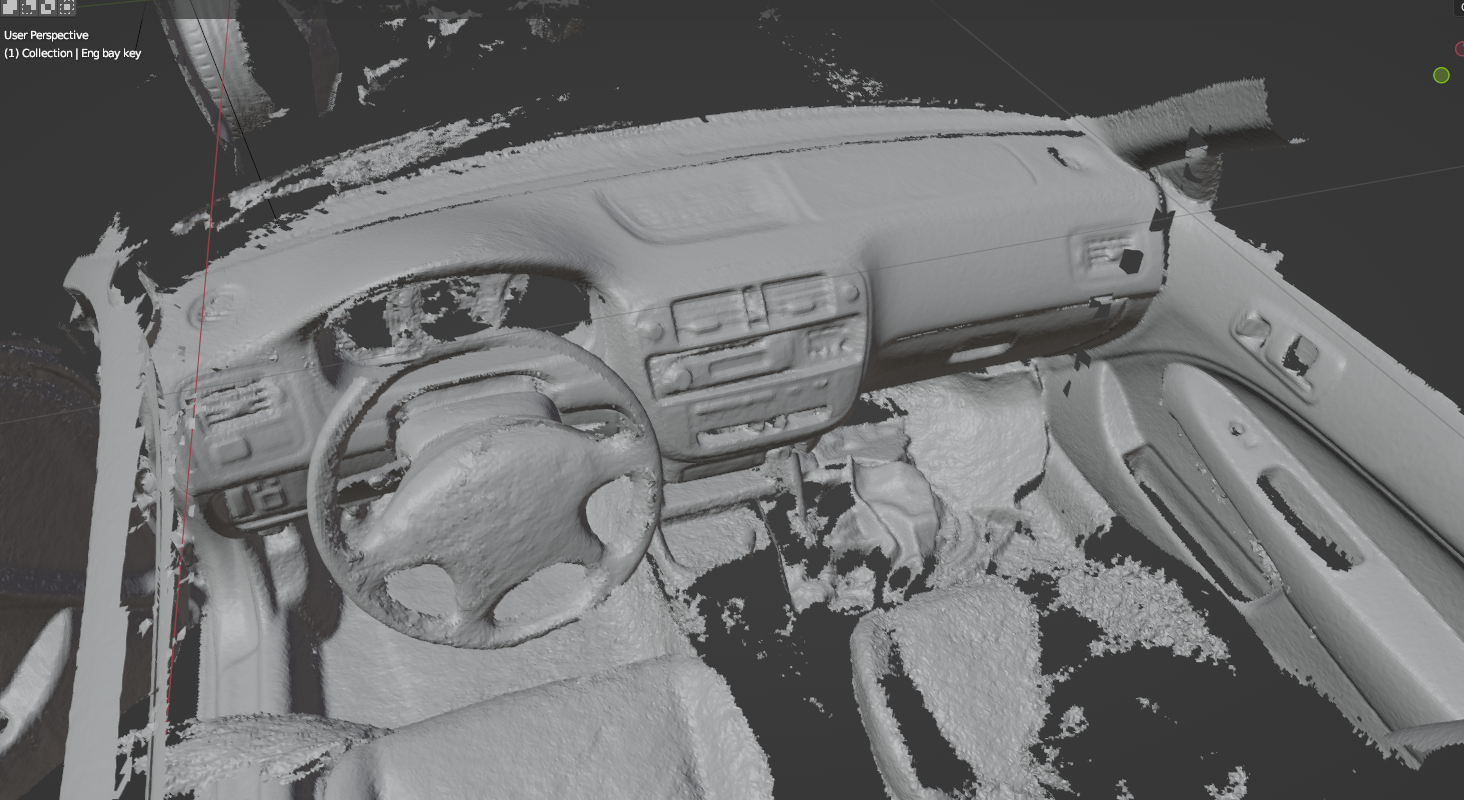
I've also been LiDar scanning my EJ9 using an iPhone app called "Heges" which scans using the faceID camera. I will re-topo the dashboard from these scans.
I'm currently working on 2 new cars. An R33 GT-R and this civic.The full modelling process is being recorded at 5fps into a time elapse.
I'm using images.
Current progress:
I am planning on making a coupe version as well with shared front end, as well as a pre-facelift front end.
I've also been LiDar scanning my EJ9 using an iPhone app called "Heges" which scans using the faceID camera. I will re-topo the dashboard from these scans.
I have a suggestion relating to OBJ imports, and how to make external modelling workflows more efficient. The OBJ already come with material mappings per tris, just like LFSE. By making mappings, cutouts and pages persistent trough OBJ imports, and assigning the mappings to tris based on OBJ material names, you could minimize the work you would have to redo inside the editor upon re-importing changes you've made to an external 3D model.
So imagine that when you import an OBJ the first time, it creates mappings based on the list of materials tied to that OBJ file, assigned to the correct tris. And when you import the OBJ a second time it impose the previous mappings onto tris defined by the OBJ materials. That way you can assign the mappings in the external 3D modelling program and not having to redo the mapping assignments, cutouts and page setup each time you re-import the OBJ.
While you currently can merge an SRE into main to recycle some work, the tris have to be assigned a mapping all over again.
So imagine that when you import an OBJ the first time, it creates mappings based on the list of materials tied to that OBJ file, assigned to the correct tris. And when you import the OBJ a second time it impose the previous mappings onto tris defined by the OBJ materials. That way you can assign the mappings in the external 3D modelling program and not having to redo the mapping assignments, cutouts and page setup each time you re-import the OBJ.
While you currently can merge an SRE into main to recycle some work, the tris have to be assigned a mapping all over again.
Last edited by pärtan, .
I don't know if this is intentional or not, but the caster, while moving the front wheel forward and backwards doesn't seem to change the wheel base readout. I was scratching my head over this before realizing what was going on. Maybe it would be a good idea to measure the wheel base from wheel center to wheel center, instead of where the steering axis line intersects the ground.
Deriv mods have a "download original archive" button on the mod page which is where you get the complete assortment of files. You don't need to ask permission if permission is already granted (in the case of mods with derivs turned on) You only have to ask for files if derivs are turned off.
Lfs is also the only car game with such a big mod repository available in realtime on multiplayer servers. Obviously there has to be a sensible limit to how much complexity you can add to a mod since it has to be able to download for all clients without interrupting the game experience. With that being said I do agree that 1600 is cutting it pretty close for some more complex wheel designs. 2000 sounds good to me.
Visst!
 Bara du skriver credits så
Bara du skriver credits så
Last edited by pärtan, .
I think you're right. I will tweak the sound a bit in the next update.
Bump with more suggestions.
Allowing front Mac Pherson suspension where the strut is not in line with the steering axis line.
Most real cars are setup in such a way, and it produce a different camber curve.
When the strut compress in this configuration, the angle between the wheel axis and SAI line changes. This is not the case with the setup in LFS where the strut is always inline with the steering axis.
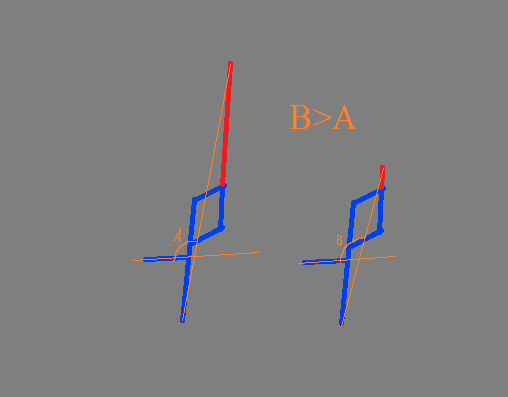
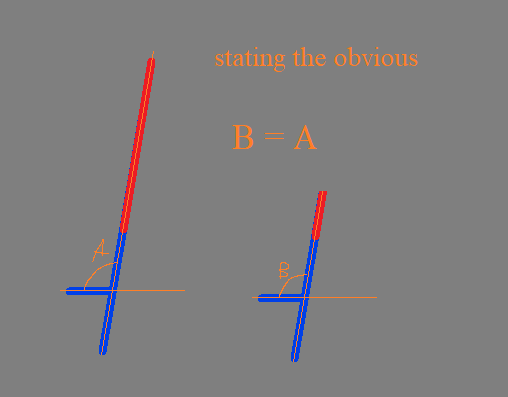
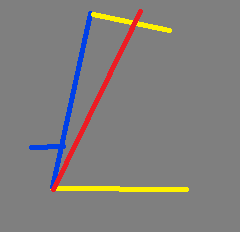
And just to add some visuals to previously mentioned suggestions.
Here is an example of an asymmetric upright, found in cars like Honda Civic 4 5 6 gen, Toyota altezza, chaser, but probably many more.
Allowing front Mac Pherson suspension where the strut is not in line with the steering axis line.
Most real cars are setup in such a way, and it produce a different camber curve.
When the strut compress in this configuration, the angle between the wheel axis and SAI line changes. This is not the case with the setup in LFS where the strut is always inline with the steering axis.
And just to add some visuals to previously mentioned suggestions.
Here is an example of an asymmetric upright, found in cars like Honda Civic 4 5 6 gen, Toyota altezza, chaser, but probably many more.
Last edited by pärtan, .
This is so amazing! I have a suggestion which is to have a motor reaction torque value which you can connect to a rotator in order to get some engine movement in vehicles where the engine is visible
Not a super important bug, but it seems the suspension diagram is missing the rims now.
Would be cool indeed if they had 2 or 3 times the detail, especially now with motorcycles since the rider is more visible.
Driver skins would be cool as well. And helmet options such as
Regular racing helmet, vintage racing helmet, motocross helmet.
Driver skins would be cool as well. And helmet options such as
Regular racing helmet, vintage racing helmet, motocross helmet.
Best bike mod I love it
Looks
sound
handling
all perfect
I love itLooks
sound
handling
all perfect
Loving the bike update! Very nice and playable on mouse steering. Excellent job.
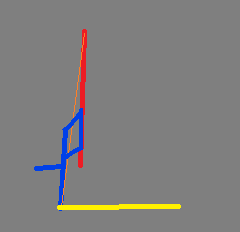
Regarding bikes, one thing I have noticed is that doing ride height adjustments moves the front wheel in Z axis, and not in the steering axis. And the wheel is misaligned with the fork when you lower it. (as seen in the image)
Not sure if this is a mod based issue or a game based issue. But the spring action acts correctly. Just a little detail.
Regarding bikes, one thing I have noticed is that doing ride height adjustments moves the front wheel in Z axis, and not in the steering axis. And the wheel is misaligned with the fork when you lower it. (as seen in the image)
Not sure if this is a mod based issue or a game based issue. But the spring action acts correctly. Just a little detail.
afaik the car simulation is at 2000hz (20 sub steps), while the collision detection is at 100hz
My uneducated guess is that the suspension already is 3-dimensional in simulation (an A-arm consisting of two constrains in a V shape) but that there is no adjustability for it. This would in theory make anti-dive and anti-squat an easy implementation.
Whether or not the steering is simulated with tie rods, I also don't know for sure, but I would guess not because of how perfect the steering behaves in all situations.
Whether or not the steering is simulated with tie rods, I also don't know for sure, but I would guess not because of how perfect the steering behaves in all situations.
More indepth suspension modding
I know the devs have their hands full but they have been surprising us before with cool stuff. So I'm wondering if there is any plan to expand on the control we have over suspension geometry, allowing more suspension types with suspension arm locations place able in 3 dimensions. Allowing things like:
Multi link
semi trailing arm
Live axle with panhard bar or watts link
Toe curves
Anti dive/anti squat
non symmetric uprights for double wishbone
manual steering rack placement
I have a feeling the physics engine is more than capable to handle all of this if you let it loose
And granted, it would make it harder to build a coherent suspension but the current 2D system could still be left there as an option.
Multi link
semi trailing arm
Live axle with panhard bar or watts link
Toe curves
Anti dive/anti squat
non symmetric uprights for double wishbone
manual steering rack placement
I have a feeling the physics engine is more than capable to handle all of this if you let it loose
And granted, it would make it harder to build a coherent suspension but the current 2D system could still be left there as an option.
With permission from OpenClutch, I'm posting the OBJ for SLX180, to help those who wants to make derivs.
So dropped some new updates on this recently if anyone wanna try.
Changed suspension geo abit. It has lower SAI, kinda like caster plates going outside the strut towers (as many comp s15's use)
And went back to double wishbone rear, and tweaked geo to handle better.
pretty low caster too. Let me know how it feels, i haven't tried it on wheel, only on mouse.
Lemme know if the FFB is too weak or fine. If it's too weak i will increase the caster a bit again.
Also included a fast drift setup with road supers in the back, and road normals in the front. Still with the 265 235. Can drift pretty wide and fast with that for a short distance before the tires overheat.
I personally like to add 100kg to the front tires, but that's just my own preference.
And sorry about still using the vanilla LFS steering wheel. I'm gonna replace it at some point. It's just I'm right at the top of the tris limit so i have to optimize more for that.
Changed suspension geo abit. It has lower SAI, kinda like caster plates going outside the strut towers (as many comp s15's use)
And went back to double wishbone rear, and tweaked geo to handle better.
pretty low caster too. Let me know how it feels, i haven't tried it on wheel, only on mouse.
Lemme know if the FFB is too weak or fine. If it's too weak i will increase the caster a bit again.
Also included a fast drift setup with road supers in the back, and road normals in the front. Still with the 265 235. Can drift pretty wide and fast with that for a short distance before the tires overheat.
I personally like to add 100kg to the front tires, but that's just my own preference.
And sorry about still using the vanilla LFS steering wheel. I'm gonna replace it at some point. It's just I'm right at the top of the tris limit so i have to optimize more for that.
Last edited by pärtan, .
Brick 8500 B5-R
Hello. An early view of a new project. For this one I don't have a time elapse like the saliva 15 but I have a good WIP screenshot that I would like to share.
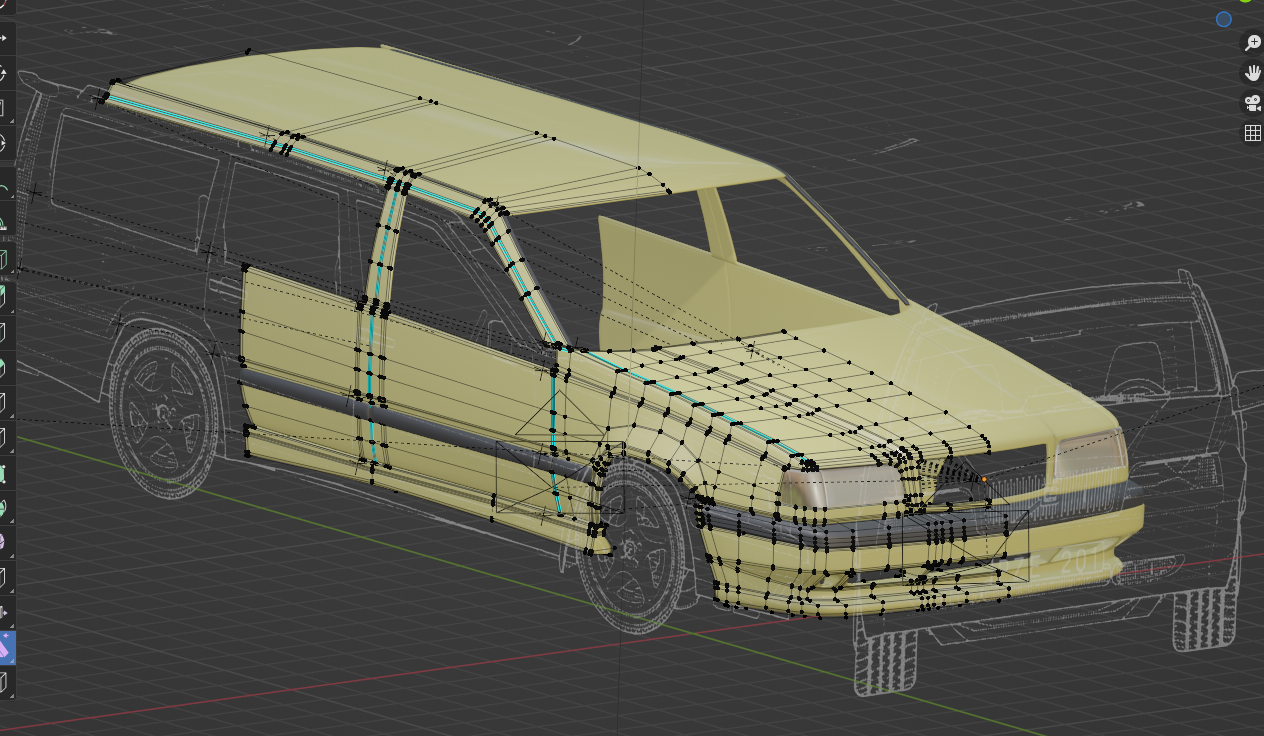
We are a long way left until finished on this but I thought i would make a thread to post my progress reports in.
We are a long way left until finished on this but I thought i would make a thread to post my progress reports in.
FGED GREDG RDFGDR GSFDG